Vector symbols explained
Here you will find the mathematical notation used for the n-vector page.
The notation system used for the n-vector page and in the files for download is presented in Chapter 2 of the following thesis: Gade (2018): Inertial Navigation - Theory and Applications. A simplified presentation is given here.

Coordinate frame
Coordinate frames are designated with capital letters, e.g. the three generic coordinate frames A, B, and C.
We also have specific names for some common coordinate frames:
| Coordinate frame | Description |
| E | Earth |
| N | North-East-Down |
| B | Body, i.e. the vehicle |
Note that it is no problem to only use the position or the orientation of a coordinate frame. E.g., in some cases, we just care about the position of point B and C (and sometimes we only care about the orientation of N).
General vector
Position vector
Instead of the general vector k, we can have a specific vector that goes from A to B. This vector can be decomposed in C. A, B, and C are three arbitrary coordinate frames. We would write this vector:
In program code: p_AB_C
The letter p is used since this is a position vector (the position of B relative to A, decomposed/resolved in the axes of C).
Example a)
From the subscript, we see that this is the vector that goes from E (center of the Earth) to B (the vehicle). The superscript tells us that it is decomposed in E, which we now assume has its z-axis pointing towards the North Pole. From the values, we see that the vector goes 6371 km towards the North Pole, and zero in the x and y directions. If we assume that the Earth is a sphere with radius 6371 km, we see that B is at the North Pole.
Example b)
The vector goes from B, e.g. an aircraft, to C, e.g. an object. The vector is decomposed in N (which has North-East-Down axes). This means that C is 50 m north of B and 60 m east, and C is also 5 m above B.
Properties of the position vector
I.e. swapping the coordinate frames in the subscript gives a vector that goes in the opposite direction. We also have:

I.e., going from A to D is the same as first going from A to B, then from B to D. From the equation, we see that B is cancelled out. A, B, C, and D are arbitrary coordinate frames.
Rotation matrix
Properties of the rotation matrix
We have that
where the T means matrix transpose. We also have the following property (closest frames are cancelled):
If we compare these properties with the position vector, we see that they are very similar: minus is replaced by transpose, and plus is replaced by matrix multiplication. A, B, and C are three arbitrary coordinate frames.
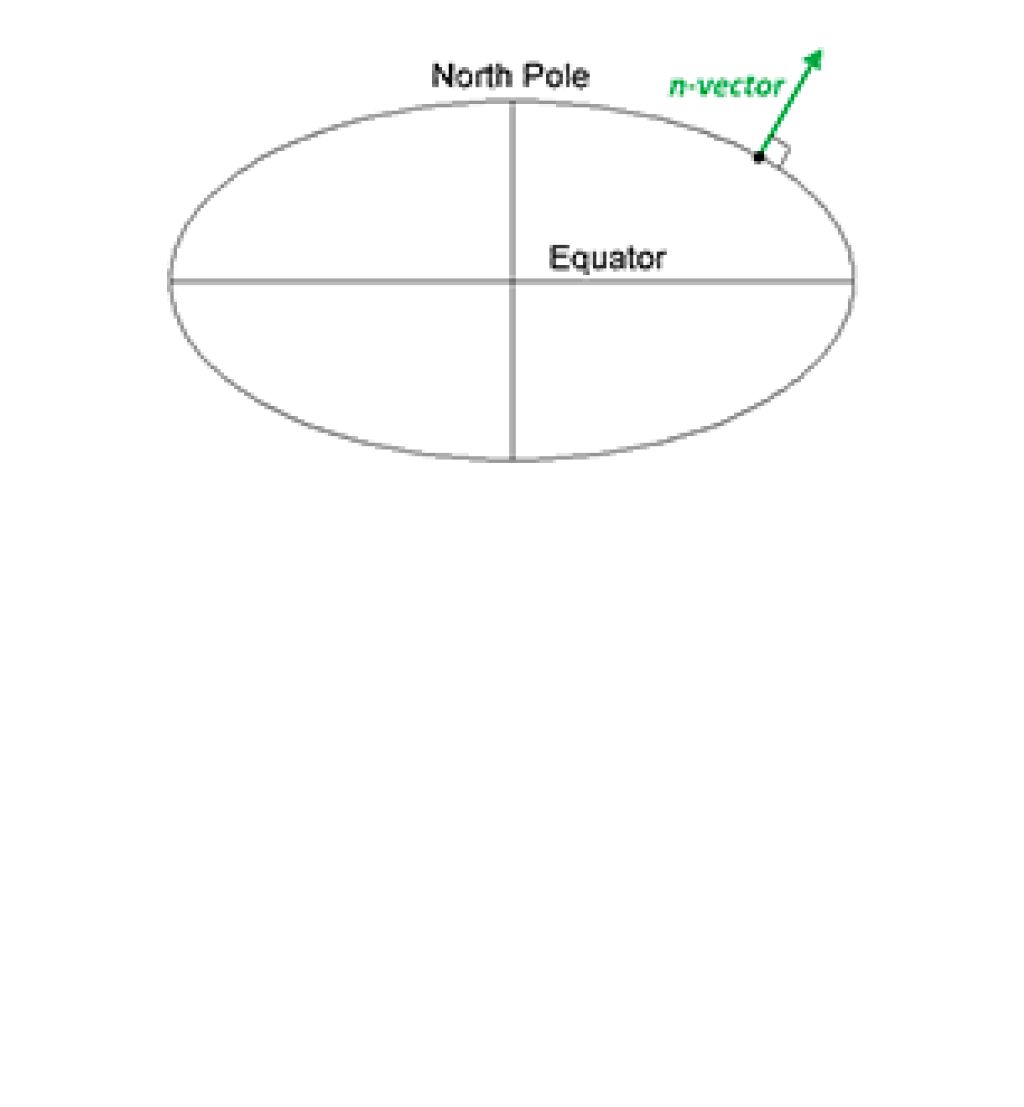
n-vector
The n-vector is in almost all cases decomposed in E, and in the simplest form, we will write it
This simple form can be used in cases where there is no doubt about what the n-vector expresses the position of. In such cases, we can also express the position using e.g. the variables lat and long, without further specification.
However, if we are interested in the position of multiple objects, e.g. A and B, we must specify which of the two, both for n-vector and for latitude/longitude. In this case we will write:
n_EA_E and n_EB_E)
And